I was kind of just "it's a thing" about this until I went and labeled this picture. Now I'm kind of impressed with it.
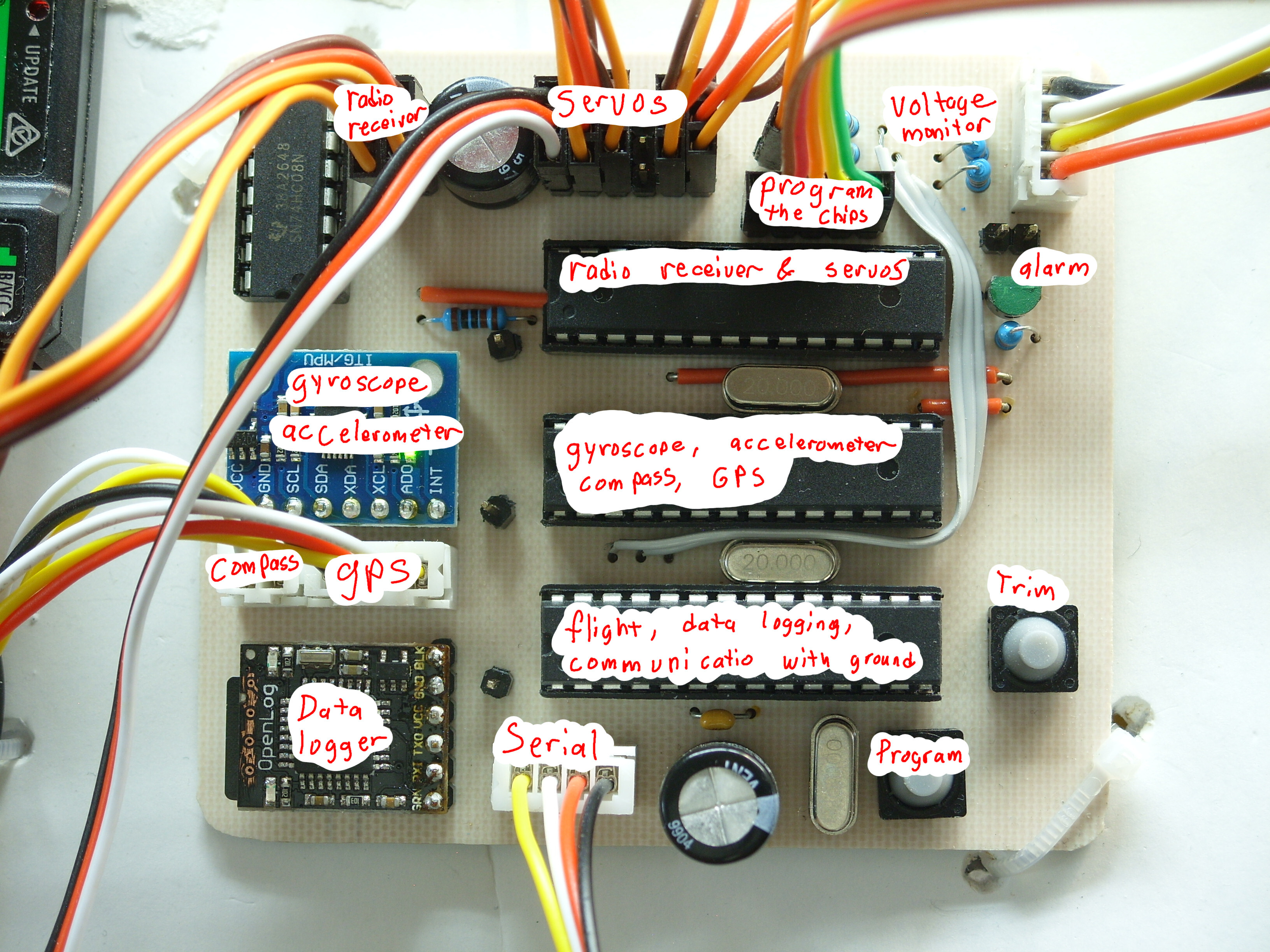
Some notes, in least-obvious to most-obvious order:
The "program" button at the bottom tells the chip at the bottom, which is the SPI bus master, to stop operating, as it will interfere if I'm trying to program one of the other two chips.
The "trim" button allows me to move the control surfaces of the plane to a new zero point, press that button, and then it will offset the control inputs to match. Not only is this much easier than how the RC controller does trimming, but it's also necessary for when the flight controller is flying the plane as it doesn't go through the RC controller.
The serial port at the bottom connects to a PC for testing, but can also connect to these cool cheap data radios I found on eBay for $10, so I can have the plane transmit its position to the ground and possibly do other stuff in the future. The data logger to the left connects to the same serial port so it will just record anything that was transmitted to the ground. Not only do the radios lose data packets sometimes, but also this lets me have data logging even if I don't have a laptop nearby.
It has several modes of operation, controlled by the extra switches on the RC controller.
Full-manual mode: The control stick inputs are simply fed to the servo motors, with only adjustments made for the trim setting.
Semi-manual mode: The plane automatically levels itself during flight, and only rolls or pitches when the control sticks command it to. When the control sticks are released, it returns to level flight. It's so easy to fly in this mode that I'm forgetting how to fly in full manual mode.
Circle in place: The plane flies up 30 meters and then simply circles. The idea with this is that if the plane gets somewhere I can't see it, I can flip a switch and it takes care of itself until I can move to somewhere that I can see it.
Waypoint mission: The plane follows a pre-programmed set of waypoints.
Return and land: The plane returns to the RC field and automatically lands itself.
Connection lost: The plane returns to the RC field and circles above it until connection is restored.
All of this is fairly well-tested and so I don't think there's any reason I can't go and test it on the real plane other than that I'm afraid to. I also don't know what more testing I can do since at this point the primary problem with testing is that it's apparent that none of the planes in the simulator perform like my plane. So, IDK, I guess I need to figure out something more to do to build my confidence in it and just go try it out and see what happens.
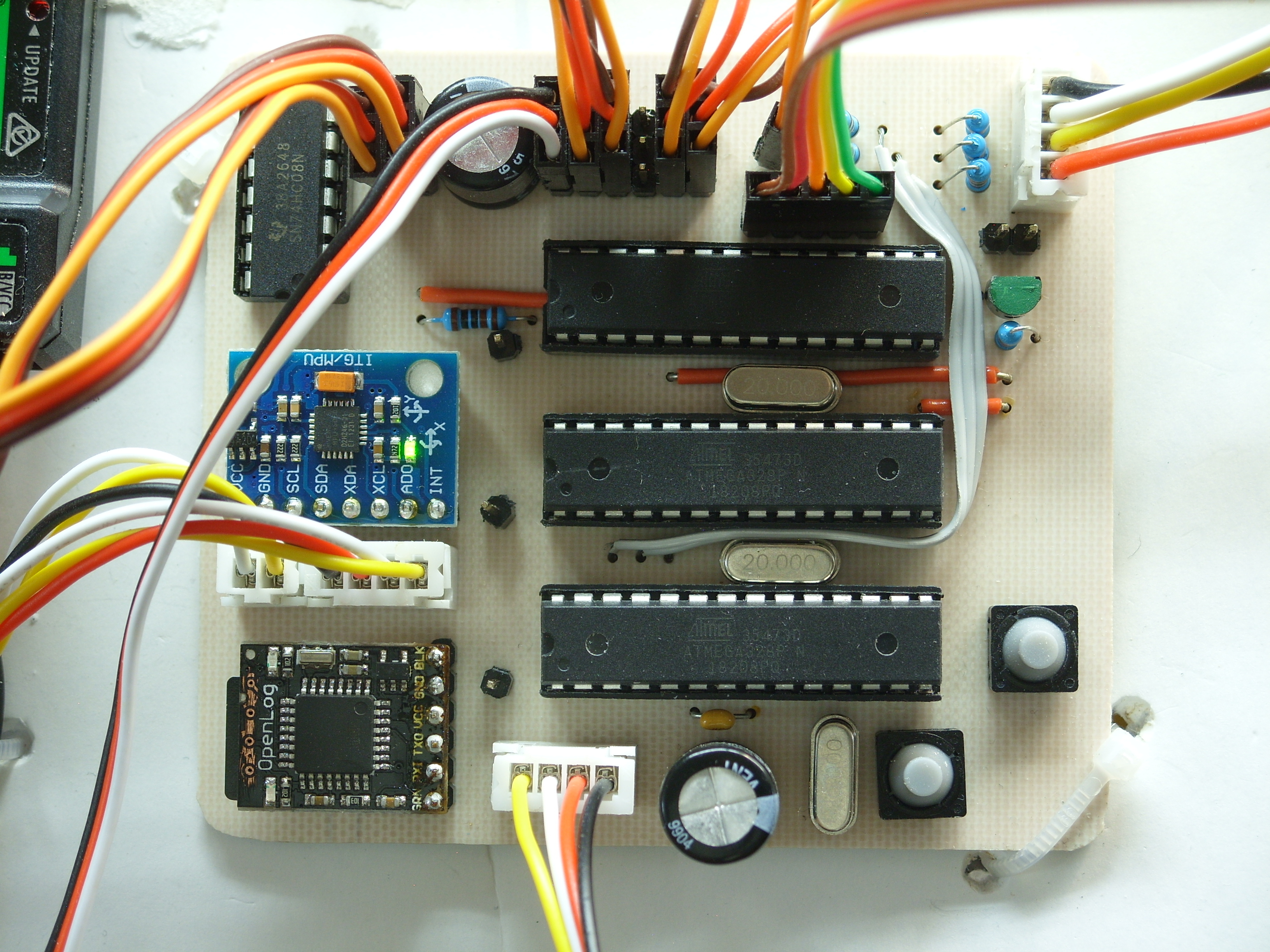
Here's the picture without the labels.